OpenAI’s Rubik Cube-Wigging Robot: A Breakthrough in Robotic
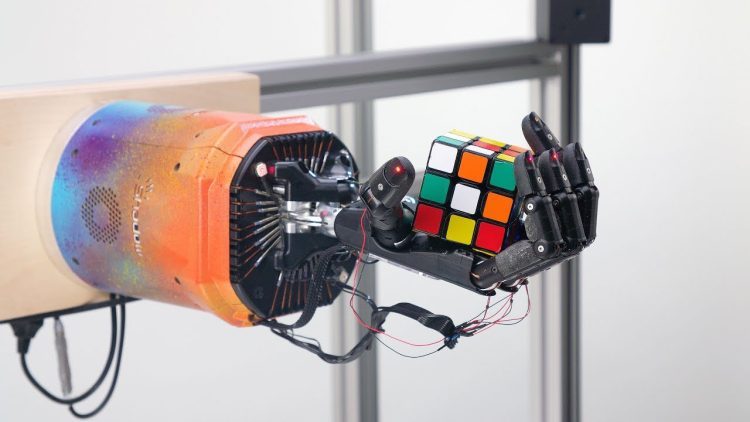
OpenAI, a leading artificial intelligence research laboratory, has recently made significant strides in the field of robotic manipulation by teaching a robotic hand to solve a Rubik’s Cube [1]. This achievement showcases the potential of using neural networks and simulation-based training to tackle complex real-world problems. In this article, we will delve into the details of OpenAI’s Rubik Cube-Wigging Robot and explore the implications of this breakthrough.
Training a Robot Hand to Solve the Rubik’s Cube
OpenAI’s research team employed a pair of neural networks to train a robot hand to solve the Rubik’s Cube with human-like dexterity [2]. The first neural network, known as the “vision network,” analyzes images of the scrambled cube and determines the current state of the puzzle. The second network, called the “control network,” receives this information and generates a sequence of motor commands to manipulate the cube and solve it.
To train these networks, OpenAI utilized a simulation environment that emulates the physics of the real world. The researchers collected data by running numerous simulations where the robot hand attempted to solve virtual Rubik’s Cubes. This data was then used to train the neural networks, enabling them to learn the necessary strategies and movements required to solve the puzzle.
The key innovation in OpenAI’s approach lies in its ability to transfer the knowledge gained from simulation to the real world. By using a technique called “sim2real transfer,” the researchers were able to successfully apply the trained neural networks to a physical robot hand [4]. This breakthrough demonstrates that models trained solely in simulation can be utilized to solve complex manipulation tasks on real robots.
The Algorithmic Advancement
OpenAI’s Rubik Cube-Wigging Robot relies on a novel algorithm that combines reinforcement learning and domain randomization [3]. Reinforcement learning allows the robot hand to learn from trial and error, receiving feedback on its performance and adjusting its actions accordingly. Domain randomization, on the other hand, involves introducing variations in the simulation environment to expose the neural networks to a wide range of scenarios. This helps the networks generalize their learning and adapt to different real-world conditions.
The combination of reinforcement learning and domain randomization proved to be highly effective in training the Rubik Cube-Wigging Robot. The algorithm enabled the neural networks to acquire a robust understanding of the Rubik’s Cube mechanics and develop strategies to solve it efficiently.
Implications and Future Applications
OpenAI’s achievement in training a robot hand to solve the Rubik’s Cube has significant implications for the field of robotic manipulation. This breakthrough demonstrates the potential of using simulation-based training to tackle complex real-world problems. By leveraging the power of neural networks and reinforcement learning, researchers can train robots to perform intricate tasks that were previously considered challenging or even impossible.
The Rubik Cube-Wigging Robot’s success paves the way for advancements in various domains, including manufacturing, logistics, and healthcare. Robots equipped with similar capabilities could be deployed in factories to handle intricate assembly tasks or assist surgeons in delicate procedures. The ability to train robots in simulation environments before deploying them in the real world also reduces costs and risks associated with physical experimentation.
Conclusion
OpenAI’s Rubik Cube-Wigging Robot represents a significant milestone in the field of robotic manipulation. By training a robot hand to solve the Rubik’s Cube using neural networks and simulation-based training, OpenAI has demonstrated the potential of this approach for solving complex real-world problems. This breakthrough opens up new possibilities for the application of robotic manipulation in various industries. As researchers continue to refine these techniques, we can expect further advancements in the capabilities of robots and their integration into our daily lives.